贝博体育艾弗森代言:直流电机驱动器电路图分享
,并根据信号调整驱动器的输出。功率输出模块经过控制电流或电压的大小来驱动直流电机。
直流电机驱动器大范围的应用于各种需要精确控制转速和转矩的场合,如电动汽车、航空航天、机器人等。由于直流电机的控制精度高、响应速度快,因此直流电机驱动器在许多领域具有优势。
总之,直流电机驱动器是一种重要的电子设备,可以在一定程度上完成直流电机的精确控制,大范围的应用于各种领域中。
接下来小编给大家伙儿一起来分享一些直流电机驱动器电路图,以及简单分析它们的工作原理。
这是使用单个 N 沟道 MOSFET 的直流电机驱动电路。在该电路中,直流电机继续沿一个方向运行,直到按下开关时它会反转方向。该电路可用作不同项目中的电机驱动器。事实上,它只需要很少的组件,并能很容易地构建。如果您正在寻找与微控制器或开发板一起使用的电机驱动电路,请考虑使用此双向电机控制电路,以方便使用并更好地控制电机运动。
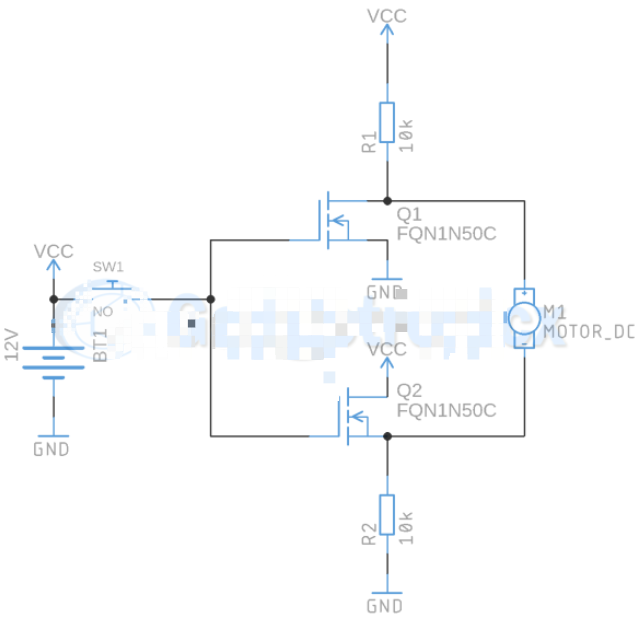
首先,我们有一个 12VDC电池作为能源。开关 Sw1 将其直接连接到两个 MOSFET 的栅极。两个 MOSFET 的源极引脚均连接至地或电池的负极端子。当两个源都连接到地或电池的负极端子时,我们的直流电机的输出将出现在 Q1 的漏极引脚和 Q2 的源极中。
在电池和FET的每个栅极之间连接一个按钮可拿来控制晶体管的ON/OFF状态。当未按下按钮时,晶体管将处于开路状态,电机从其正极引脚上 FET Q1 的漏极接收 12V 电压。 Q2 到电机负极引脚的电压为 0V。但是当我们按下按钮时,我们使晶体管处于饱和状态。因此,电机现在从 Q1 接收 0V,从 Q2 接收 12V,从而改变电机的旋转方向。
您可以以类似的方式添加电机来完全控制它。为此,您应该确保您的 MOSFET 可处理此处使用的电机的电流摄入。另外,如果您使用电池为电路供电,您应记住电机的电流摄入量应小于电池的电流消耗容量。
下图所示电路是基于MicrochipICTC4424 的直流电机驱动电路。 TC 4424 是一款双 MOSFET 驱动器,可用于多种应用,如 SMPS、脉冲变压器驱动器、线路驱动器、电机驱动器等。
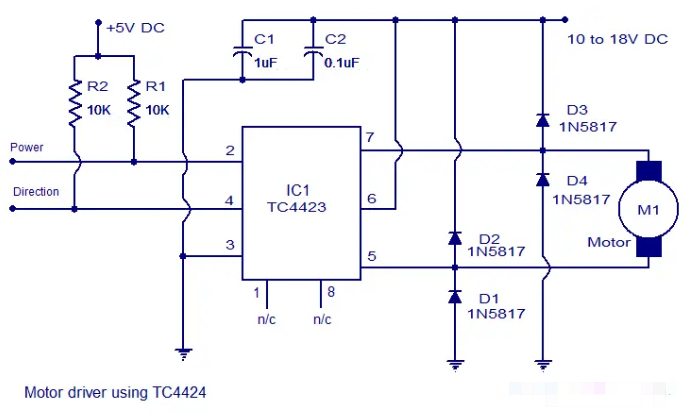
电机旋转的速度和方向取决于引脚 2 和 4 的逻辑电平。电机的旋转速度与馈送到引脚 2 的 PWM 信号的占空比成正比。如果引脚 4 保持逻辑电平0 电机将正向运行,如果保持为逻辑 1,则电机将反向运行。
电路中,电阻R1和R2为上拉电阻。 D1 和 D4 保护 IC芯片免受欠压(负反电动势)影响。 D2 和 D3 为电机正反电动势提供安全路径,以耗散并保护 IC。电容器C1 和 C2 可降低电噪声。
以下所述电路用于3V供电的微型直流电机的驱动,这种电机有两根引线,更换两根引线的极性,电机换向。该驱动电路要求能进行正反转和停止控制。
如下图所示,这电路是作者最初设计的电路,P1.3、P2.2和P2.4分别是51单片机的IO引脚。设计的工作原理是:当P1.3高电平、 P2.2和P2.4都为低电平时,电机正转。此时,Q1和Q4导通,Q2和Q3截止,电流注向为+5VàR1àQ1àMàQ4;当P1.3低电平、 P2.2和P2.4都为高电平时,电机反转。此时,Q2和Q3导通,Q1和Q4截止。P2.2为高电平同时P2.4为低电平时,电路全不通,电机停止。
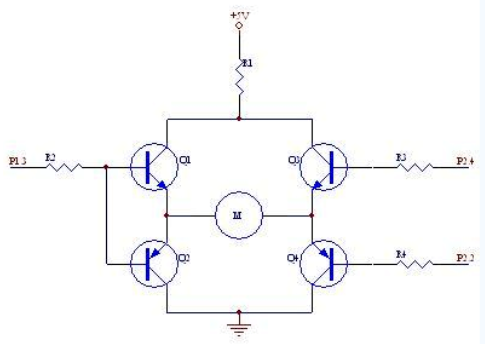
但实际实验情况去出人意料,即电机正向和反向都不转。经测量,当P1.3高电平,P2.2和P2.4都为低电平时,Q4导通,但Q1不导通,P1.3的电平只有0.67V左右,这样Q1无法导通。
经分析原因见下:51的P1、P2、P3各引脚都是内部经电阻上拉,对地接MOSFET管,所谓高电平,是MOSFET截止,引脚上拉电阻拉为高电平。若此内部上拉电阻很大,比如20K,则当上图电路接上后,则流过Q1的b极的电流最大为(5-0.7)/20mA=0.22mA,难以动Q1导通。所以此电路不通。