
直流电机需求直流电源的供给,这要求一个能将沟通电转变为直流电的电源设备。别的,直流电机的起/停、维护、调速等操控电路,也常常与直流电源集成于一体,称为直流调速设备或直流调速器。
前期对直流电机的调速操控,用直流发电机作直流电机的直流电源,用接触器合作变阻箱完结直流电机的启/停操控和调速,体系冗杂、造价高。后期因为晶闸管等电力电子器材的老练使用,出现了停止式直流调速设备,体系配置变得精简,而操控功用大幅度提高。国内外,有一些专业厂家,专门出产了专用于直流电机调速的系列新产品,进口产品如英国欧陆传动体系有限公司出产的《590+直流数字式调速器》、ABB(瑞典阿西亚公司和瑞士的布朗勃法瑞公司兼并而成)集团公司出产的《DCS400晶闸管变流器直流传动体系》等,国内出产厂商更是各式各样,不下百家。其产品规模包含了大、中、小功率,他励、自励直流电机的调速操控。
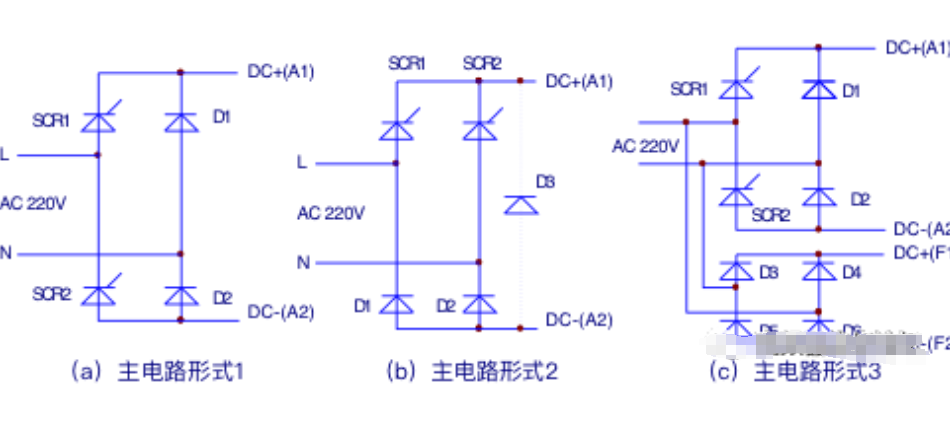
小功率直流电机,串、并励结构都有,上图(a)、(b)为串励直流电机所用的调压电路,电枢和励磁选用同一电源供电。(a)电路,当电源L端为电压极性为正时,构成SCR1→电机绕组回路→D2,回到电源N端;L端为电压极性为负时,构成SCR2→电机绕组回路→D1→电源N端的电流转路。从剖析得出,SCR1与D2相串联,故操控SCR1的导通角,就能够完结可控整流。这种由二极管和晶闸管构成的整流桥电路,又称半控桥调压电路。假定两只晶闸管处于最大导通角,电路形同一个桥式整流器,输入AC220V,输出整流电压为220V×0.9=198V,故调压规模约为0~198V;(b)电路,两只可控硅坐落整流桥的上桥臂,仍出现SCR1、D2和SCR2、D1的串联整流形式,故操控两只晶闸管的移相角,来完结0~198V的调压,施行对串励直流电机的调速操控。部分电路中还加有续流二极管D3,以使负载(绕组)中的电流接连,作业平稳及坚持比较高的力矩输出。可控整流电压电压的从0起调,因最小导通角受限,换言之,即最大移相角的受限,是从0V突跳至必定电压值(如20V),故实践可调规模为20~198V,但调至20V后,能“跳”至0V,也能使晶闸管关断。
桥式整流电路的4个元件,每只元件接受最大正向电压为220V×1.41=310V,接受反向电压峰值为220V×1.57=345V,每只元件的流转电流,为整流(负载)电流的0.5倍。晶闸管最大导通角180°。
前期调速器产品的主电路,多选用分立元件构成,后期的小功率调速器的主电路,多选用晶闸管模块,图1主电路的(a)、(b)电路,为单只晶闸管模块所替代,并且模块也内含续流二极管。
(c)电路,适用于他励直流电机,电枢供电是由晶闸管桥式可控整流电路构成,励磁电源多为由四只二极管(或整流模块)构成的桥式整流电路,励磁电压为固定整流电压,为基速以下的降速调理作业。称为基速以下满励作业;极少数电机,励磁电源也为晶闸管调压(与电枢电源结构相同),可对励磁电流进行调理,故可完结基速以上弱磁作业。
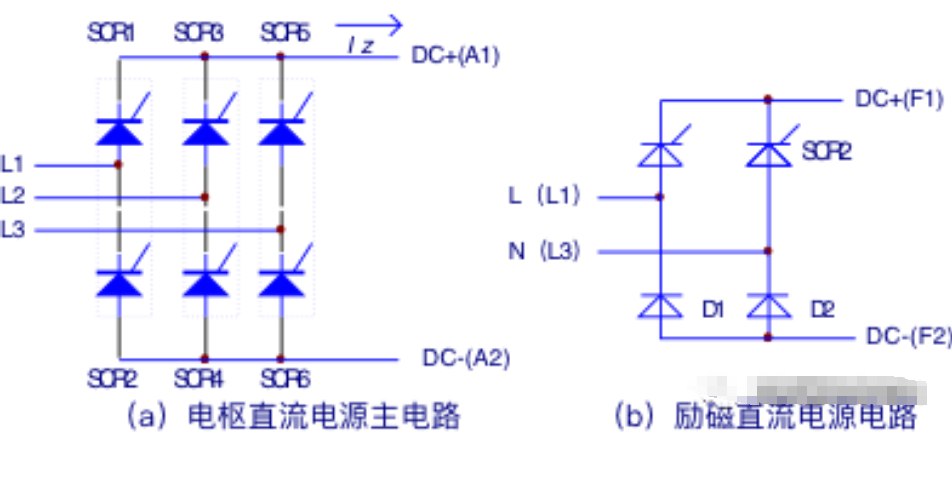
中、大功率他励直流电机,选用三相动力电源作为输入电源,电枢供电电源由六只单向晶闸管(三只双晶闸管模块)构成,称为“全控桥”可控整流电路,当固定输出最大励磁电流时,经过调理电枢绕组的供电电压,来完结基速下的降速调理(恒转矩作业);励磁电源多为半控桥可控整流电路结构,当电枢施以最高电压时,进行弱磁调理(恒功率作业),又可完结基速以上的升速调理。图2为典型主电路结构,如欧陆590、ABB DCS400等体系列数字调速器,都是选用这种电路结构。易于与另一组反向的主电路进行并联衔接,完结所操控电机的四象限作业(见下图5)。
三相桥式全控整流电路原理图如图2(a)所示。它由三相半波共阴极接法(SCR1、SCR3、SCR5)和三相半波共阳极接法(SCR2、SCR4、SCR6)的晶闸管串联组合。其作业特点是任何时刻都有不同组别的两只晶闸管一起导通,构成电流转路(如SCR1、SCR6一起被触发注册,构成电源A相正半波电流转路),因此为确保电路发动或电流断续后能正常导通,有必要对不同组别应到导通的一对晶闸管一起加触发脉冲,所以对触发脉冲的宽度有要求(≥60°),图中6个晶闸管的组合导通次序是SCR1-SCR6-SCR3-SCR2-SCR5-SCR4,输出脉动直流电压频率是电源频率的6倍,故该电路又可称为6脉动整流电路,直流脉激动频率为300Hz。
图(a)电路输入为三相380V AC电源,晶闸管处于最大导通角时,等同于三相桥式整流电路,输出电压值为380V×1.35=513V,为习惯直流电机的供电要求,实践输出可调电压规模多为0~450V左右。每只晶闸管接受最大正向电压值为380V×1.41=535V,接受反向峰值电压为380V×1.05=399V,每只管子的流转电流为整流直流电流(Iz)的0.333倍。
元件选用与代换规矩:耐压值为380V×3≈1140V,实践选用1200V或1600V的元件或模块;电流值为正向电流值×3,按负载(整流电流Iz值)选用即可。
图中(b)电路,为半控桥式整流电路,可根据作业现场(负载)对转速规模的要求,切换引进AC220V或AC380V单相电源。
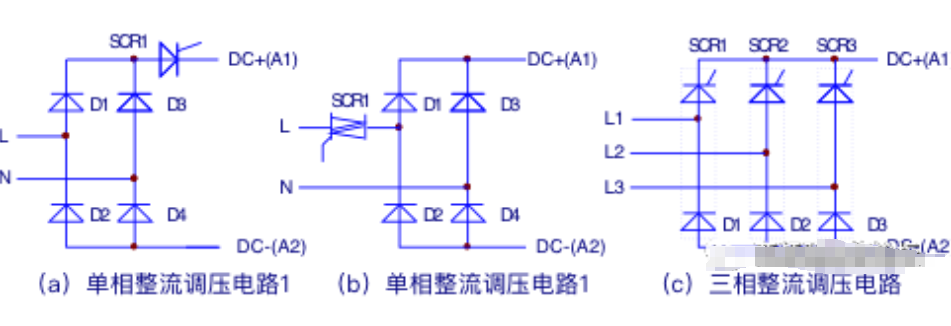
图3的电路结构尽管不行典型,但在实践的调速器设备中,使用也较为常见。(a)电路是先将输入AC220V整流成198V的脉动直流电压,再由一只晶闸管SCR1受控整流成0~198V的可调直流电压输出。因为整流电压为100Hz的脉动直流,也具有天然电压过零点,因此能够直接从整流电压端取出过零点(同步)信号,用于移相电路生成移相脉冲信号。图(b)电路,则是先用双向晶闸管对输入电源进行沟通调压,再由桥式整流器整流输出的。应该说,双向晶闸管在直流调压(速)电路中的出现是较为稀有的,直流调压,望文生义,是将沟通电转化单向直流电流的,按说双向晶闸管是派不上用场的呀。图(b)使用,也算是较为“特殊”的直流调压电路了。
上图两种单相整流调压电路与图1的(a)、(b)电路比较,尽管元件数量上有所增多(多了一只器材),但总的电路本钱却有所下降(晶闸管数量少,而二极管的价格远比晶闸管低)。与此一起,同步采样电路和触发电路,也相应简化,只需一路同步采样电路和触发电路即能够了。
图(c)电路,将下三臂晶闸管器材,换成了三只二极管(当然也能够将上三臂换为二极管)器材,从而使全体造价大为下降,同步采样和触发电路当然也同步简化。与图2的(a)电路比较,省去了三路同步采样和触发电路。但缺陷是半控桥输出电压脉动大,因选用二极管作为主电路整流元件,不能反向并联衔接使电机完结四象限作业,仅适用于单方向无级调速及一般电阻负载的可控整流设备中。
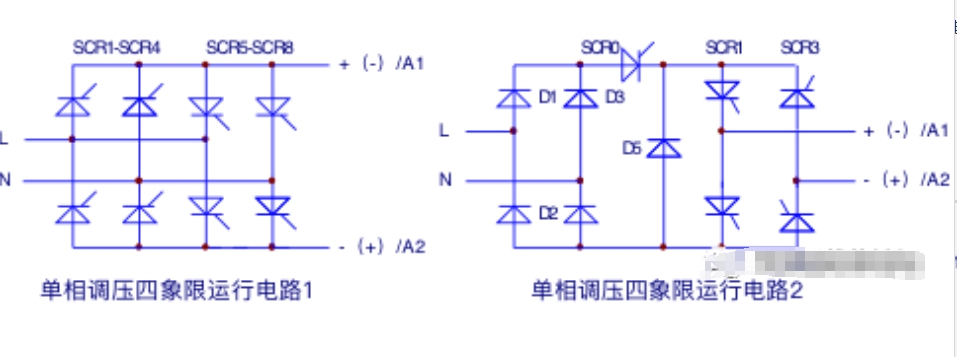
有的作业场所要求直流电机能完结四象限作业,即能够作业于“正向作业、正向制动和反向作业、反向制动”四个作业形式中。假如正、回转作业不是很频频,主电路直流输出端外接两只接触器,像操控沟通电动机正、回转相同,使用切换电枢供电电压的极性来施行正、回转操控,应该也是可行的。但接触器切换操控不习惯经常性替换、易烧熔触点、任务寿命短、维修作业量大等缺陷,因此实践使用电路是使用两套整流调压电路来切换输出电压极性,选用晶闸管的优点,是完结了无触点切换,无切换火花,且易于完结“弱电”的智能化操控。
图4左边电路,是使用两组全控桥式晶闸管调压电路,施行正回转操控的,每组须用四只晶闸管器材,操控SCR1~SCR4,能够使直流电机正转调速作业;关断SCR1~SCR4,使SCR5~SCR8受控注册,则可操控直流电机回转作业。触发电路需求8路。
图4右侧电路,对输入沟通电源桥式整流后,用SCR0单只晶闸管进行调压后,再由SCR1~SCR4四只晶闸管完结输出电压极性的“调向”,当SCR1和SCR4注册时,输出电压极性上正下负,直流电机正转调速作业;当SCR2、SCR3注册时,输出电压极性变为上负下正,直流电机回转调速作业。电路省去了一组晶闸管全控整流桥,但增加了SCR0的调压电路。在这里,输出电压凹凸的调整是由SCR0完结的,SCR1~SCR4只作业于“注册”和“关断”的两个相对状况下,适当四只开关器材,单纯完结对输出电压极性切换的功用。调压触发需1路,晶闸管通断操控发需4路。触发、操控电路比左边电路简化许多。
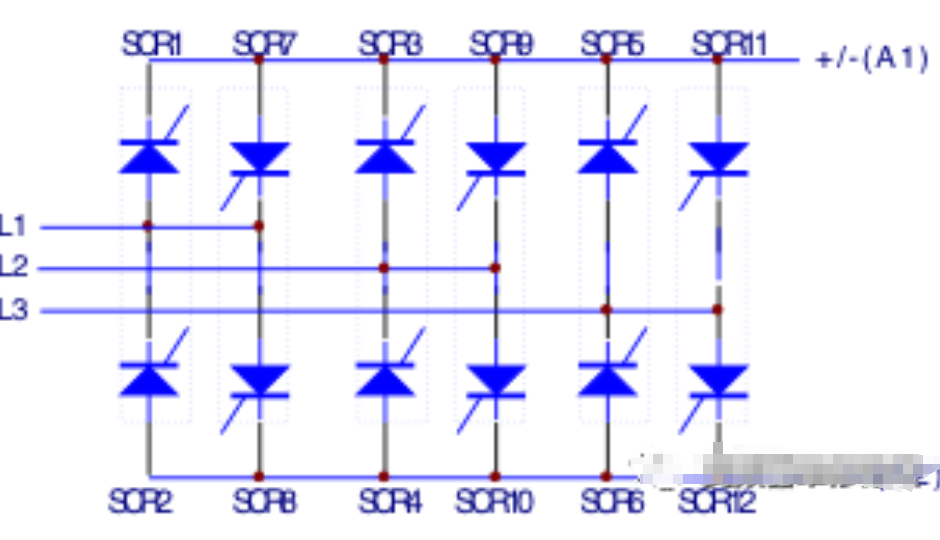
上图每只晶闸管模块内含两只单向晶闸管,可对输入电源的正、负半波别离进行可控整流。当SCR7~SCR12关断,而SCR1~SCR6被可控注册时,直流输出端上正下负,电机正转调速作业;当SCR7~SCR12处于可控注册状况,而SCR1~SCR6处于关断状况时,直流输出端上负下正,电机回转调速作业。两组电路都为三相全控桥接法,仅仅晶闸管极性相反罢了。相应的触发电路也是两套——每套是彼此独立的6路触发电路,如欧陆590、ABB DCS400等体系列数字调速器,除供给一般两象限作业的调速器外,也依照每个用户要求供给选用图5电路结构的可供电机四象限作业的直流调速器,两象限作业的调速器的线路板,其实往往也预留了另一组触发电路和主电路的装置方位。
直流电机调速器,不管简略与杂乱与否,等级低与高级与否,国产和进口与否,其电路构成都如图6所示,大致包含了电枢调压主电路、励磁调压主电路和同步信号采样电路、整机操控电路的电源电路,操控信号输入/输出电路、输出电流和电压检测(维护)电路,移相触发信号构成电路和触发功放电路等几个部分。
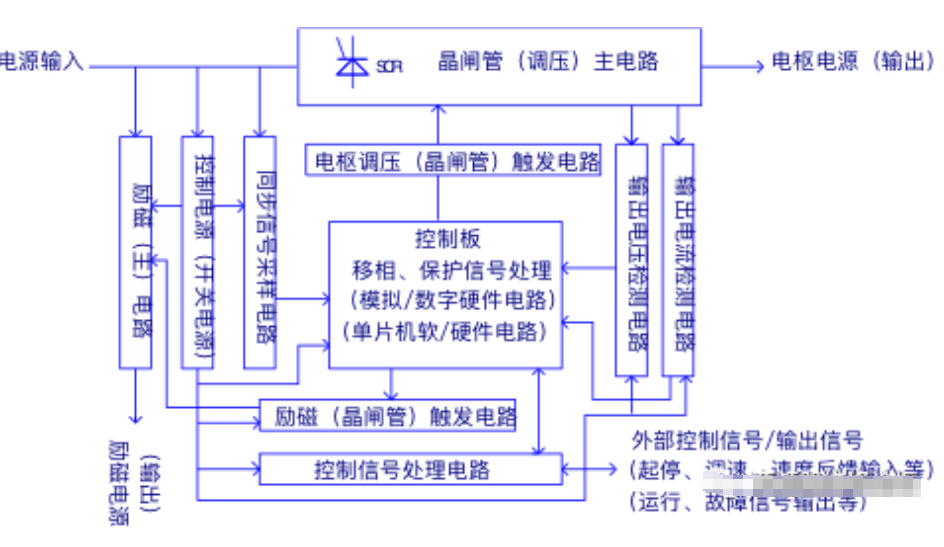
晶闸管调压主电路、操控电源、同步信号采样电路、移相信号构成电路、触发(功放)电路等可称之调速器的根本电路,这是任何直流调速器都必备的几个环节;输出电压检测、输出电流检测电路,有时还包含输入电压(缺相)检测、晶闸管模块温度检测电路,可统称为晶闸管的维护电路,此为辅佐电路之一;各种输入、输出信号——操控信号处理电路,是提高了设备的可操作操控功用,完结对直流电机的起停、调速、反应信号处理、调速器作业状况的指示等,此为辅佐电路之二。高、等级低机型的差异和差异,更多地从辅佐电路的规划上可看得出来。
其间,主电路结构不管何种机型,都是相同的;同步信号采样电路与触发电路,都是迥然不同的。移相、维护信号构成电路和操控信号构成电路,则具机型不同,而出现较大的差异,如对操控信号、维护信号和移相信号的处理,有的机型由简易模仿电路(晶体管分立元件)来完结,有的选用模仿、数字的硬件电路来完结,高级机型则选用8位或16位单片机,对一切信号进行智能化处理,使输出的触发触冲信号里“揉和了多重优化的操控信息”,其操控特性便与一般机不可同日而语了。
操控信号处理电路,有的只能完结开环调压操控,有的也仅能完结简易的闭环速度调理,处于份额(P)调理的层面上,有的机型则用杂乱电路(或软件手法)来完结PID操控功用,极大的提高了体系的动态操控特性。